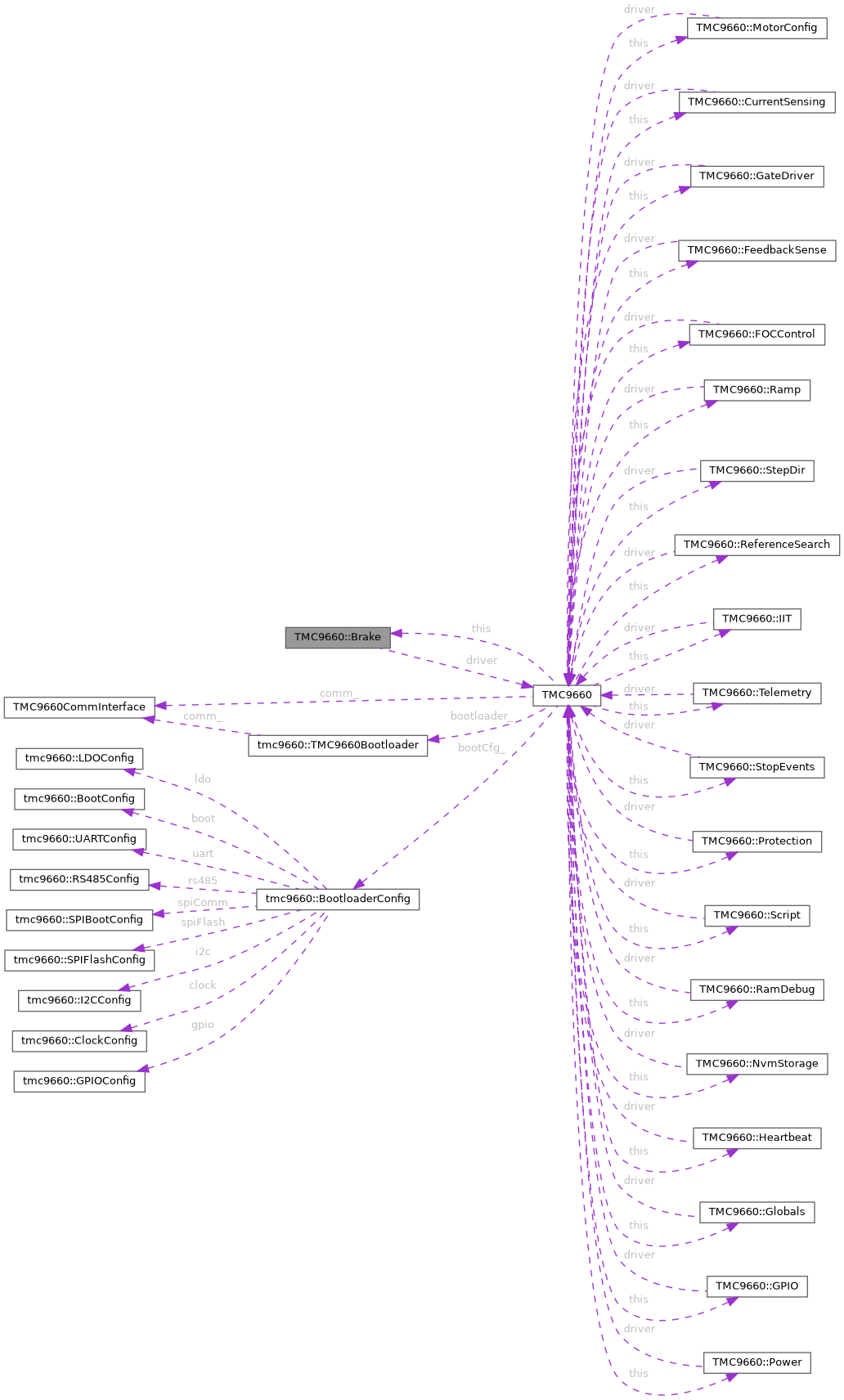
Subsystem controlling the brake chopper and mechanical brake features.
More...
#include <TMC9660.hpp>
|
| bool | enableChopper (bool enable) noexcept |
| | Enable or disable the brake chopper functionality.
|
| |
| bool | setVoltageLimit (float voltage) noexcept |
| | Set the overvoltage threshold for the brake chopper.
|
| |
| bool | setHysteresis (float voltage) noexcept |
| | Set the hysteresis for the brake chopper threshold.
|
| |
| bool | release () noexcept |
| | Trigger a release of the mechanical brake.
|
| |
| bool | engage () noexcept |
| | Engage (lock) the mechanical brake.
|
| |
| bool | setReleasingDutyCycle (uint8_t percent) noexcept |
| | Set the PWM duty cycle for releasing the brake.
|
| |
| bool | setHoldingDutyCycle (uint8_t percent) noexcept |
| | Set the PWM duty cycle for holding the brake released.
|
| |
| bool | setReleasingDuration (uint16_t milliseconds) noexcept |
| | Set the duration of the brake release initial phase.
|
| |
| bool | invertOutput (bool invert) noexcept |
| | Invert or normalize the brake output signal polarity.
|
| |
Subsystem controlling the brake chopper and mechanical brake features.
◆ Brake()
| TMC9660::Brake::Brake |
( |
TMC9660 & |
parent | ) |
|
|
inlineexplicitprivatenoexcept |
◆ enableChopper()
| bool TMC9660::Brake::enableChopper |
( |
bool |
enable | ) |
|
|
noexcept |
Enable or disable the brake chopper functionality.
- Parameters
-
| enable | True to enable the brake chopper, false to disable it. |
- Returns
- True if the command was sent and acknowledged.
◆ engage()
| bool TMC9660::Brake::engage |
( |
| ) |
|
|
noexcept |
Engage (lock) the mechanical brake.
- Returns
- True if the command was sent successfully.
◆ invertOutput()
| bool TMC9660::Brake::invertOutput |
( |
bool |
invert | ) |
|
|
noexcept |
Invert or normalize the brake output signal polarity.
- Parameters
-
| invert | True to invert the brake output, false for normal. |
- Returns
- True if the parameter was written successfully.
◆ release()
| bool TMC9660::Brake::release |
( |
| ) |
|
|
noexcept |
Trigger a release of the mechanical brake.
- Returns
- True if the command was sent successfully.
◆ setHoldingDutyCycle()
| bool TMC9660::Brake::setHoldingDutyCycle |
( |
uint8_t |
percent | ) |
|
|
noexcept |
Set the PWM duty cycle for holding the brake released.
- Parameters
-
| percent | Duty cycle (0 to 99%). |
- Returns
- True if the parameter was written successfully.
◆ setHysteresis()
| bool TMC9660::Brake::setHysteresis |
( |
float |
voltage | ) |
|
|
noexcept |
Set the hysteresis for the brake chopper threshold.
- Parameters
-
| voltage | Hysteresis in volts (0.0 to 5.0 V). |
- Returns
- True if the parameter was written successfully.
◆ setReleasingDuration()
| bool TMC9660::Brake::setReleasingDuration |
( |
uint16_t |
milliseconds | ) |
|
|
noexcept |
Set the duration of the brake release initial phase.
- Parameters
-
| milliseconds | Duration in ms (0 to 65535). |
- Returns
- True if the parameter was written successfully.
◆ setReleasingDutyCycle()
| bool TMC9660::Brake::setReleasingDutyCycle |
( |
uint8_t |
percent | ) |
|
|
noexcept |
Set the PWM duty cycle for releasing the brake.
- Parameters
-
| percent | Duty cycle (0 to 99%). |
- Returns
- True if the parameter was written successfully.
◆ setVoltageLimit()
| bool TMC9660::Brake::setVoltageLimit |
( |
float |
voltage | ) |
|
|
noexcept |
Set the overvoltage threshold for the brake chopper.
- Parameters
-
| voltage | Threshold voltage in volts (5.0 to 100.0 V). |
- Returns
- True if the parameter was written successfully.
◆ TMC9660
◆ driver
The documentation for this struct was generated from the following files: