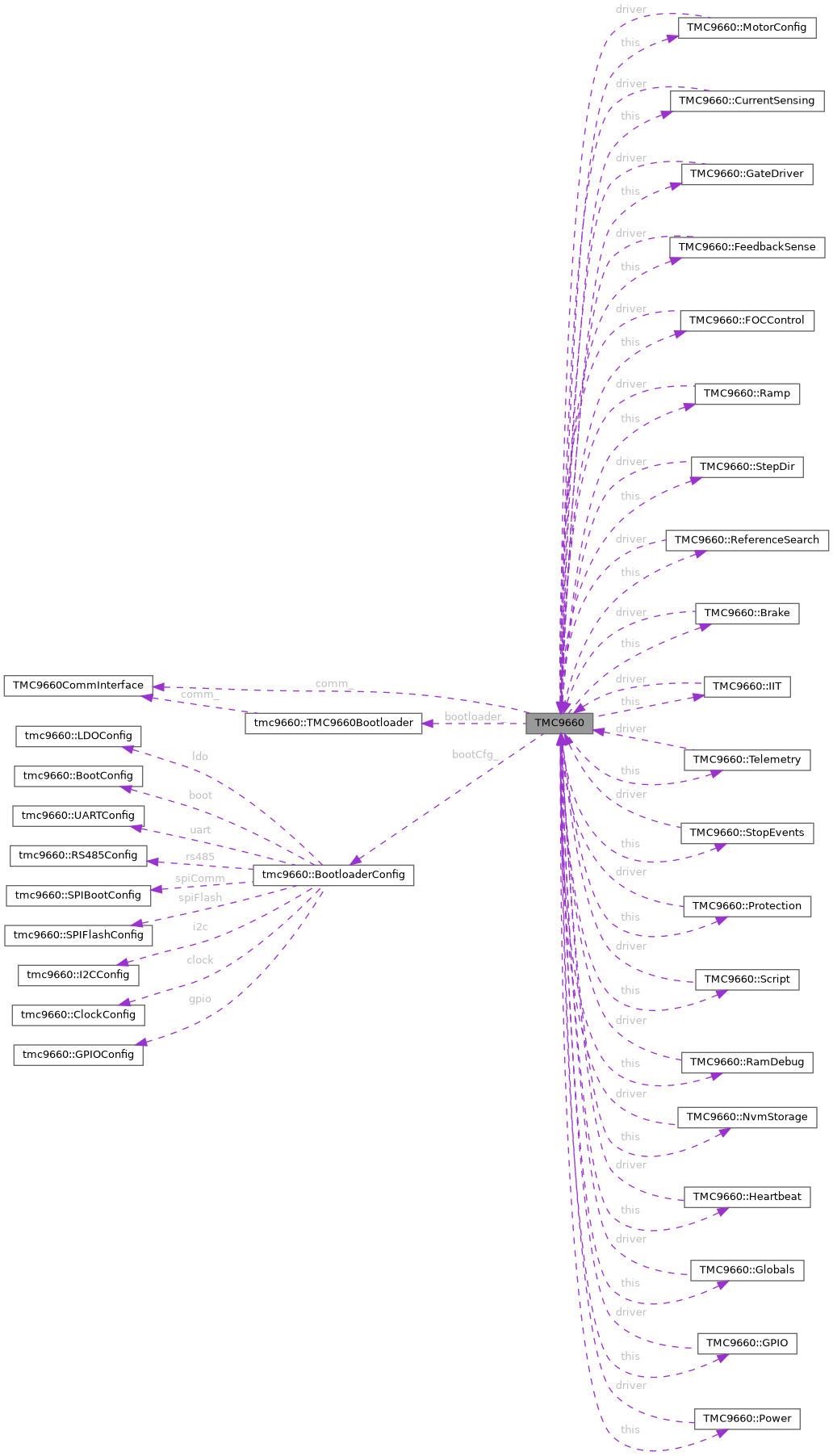
Main class representing a TMC9660 motor driver in Parameter Mode. Provides high-level functions to configure and control the TMC9660's features. The class uses a TMC9660CommInterface for communication, making it agnostic to the physical layer. More...
#include <TMC9660.hpp>
Public Types | |
| enum class | BootloaderInitResult { Success , NoConfig , Failure } |
| Bootloader initialization result codes. More... | |
| using | GlobalParamBankVariant = std::variant< uint8_t, tmc9660::tmcl::GlobalParamBank0, tmc9660::tmcl::GlobalParamBank2, tmc9660::tmcl::GlobalParamBank3 > |
Public Member Functions | |
| TMC9660 (TMC9660CommInterface &comm, uint8_t address=0, const tmc9660::BootloaderConfig *bootCfg=nullptr) noexcept | |
| Construct a TMC9660 driver instance. | |
| ~TMC9660 () noexcept | |
| Destructor for TMC9660, cleans up resources. | |
| TMC9660CommInterface & | comm () noexcept |
| Get the communication interface used by this TMC9660 instance. | |
| TMC9660::BootloaderInitResult | bootloaderInit (const tmc9660::BootloaderConfig *cfg=nullptr) noexcept |
| Bootloader initialization. | |
| bool | writeParameter (tmc9660::tmcl::Parameters id, uint32_t value, uint8_t motorIndex=0) noexcept |
| Set (write) an axis (motor-specific) parameter on the TMC9660. | |
| bool | readParameter (tmc9660::tmcl::Parameters id, uint32_t &value, uint8_t motorIndex=0) noexcept |
| Read an axis (motor-specific) parameter from the TMC9660. | |
| bool | writeGlobalParameter (GlobalParamBankVariant id, uint8_t bank, uint32_t value) noexcept |
| Set (write) a global parameter on the TMC9660. | |
| bool | readGlobalParameter (GlobalParamBankVariant id, uint8_t bank, uint32_t &value) noexcept |
| Read a global parameter from the TMC9660. | |
| bool | sendCommand (tmc9660::tmcl::Op opcode, uint16_t type=0, uint8_t motor=0, uint32_t value=0, uint32_t *reply=nullptr) noexcept |
| Send a TMCL command. Optionally return the 32-bit reply value. | |
Public Attributes | |
| struct TMC9660::MotorConfig * | this |
| struct TMC9660::CurrentSensing * | this |
| struct TMC9660::GateDriver * | this |
| struct TMC9660::FeedbackSense * | this |
| struct TMC9660::FOCControl * | this |
| struct TMC9660::Ramp * | this |
| struct TMC9660::StepDir * | this |
| struct TMC9660::ReferenceSearch * | this |
| struct TMC9660::Brake * | this |
| struct TMC9660::IIT * | this |
| struct TMC9660::Telemetry * | this |
| struct TMC9660::StopEvents * | this |
| struct TMC9660::Protection * | this |
| struct TMC9660::Script * | this |
| struct TMC9660::RamDebug * | this |
| struct TMC9660::NvmStorage * | this |
| struct TMC9660::Heartbeat * | this |
| struct TMC9660::Globals * | this |
| struct TMC9660::GPIO * | this |
| struct TMC9660::Power * | this |
Private Attributes | |
| TMC9660CommInterface & | comm_ |
| uint8_t | address_ |
| tmc9660::TMC9660Bootloader | bootloader_ |
| Bootloader helper. | |
| const tmc9660::BootloaderConfig * | bootCfg_ |
| const uint8_t | tmcCRCTable_Poly7Reflected [256] |
Detailed Description
Main class representing a TMC9660 motor driver in Parameter Mode. Provides high-level functions to configure and control the TMC9660's features. The class uses a TMC9660CommInterface for communication, making it agnostic to the physical layer.
All configuration and control is done by sending TMCL commands (Set/Get Parameter, etc.) and reading/writing parameter values. The library covers motor type setup, FOC control tuning, gate driver settings, sensor feedback configuration, protection (voltage, temperature, current) settings, executing scripts on the device's microcontroller, and reading telemetry data like temperature, current, and voltage.
Member Typedef Documentation
◆ GlobalParamBankVariant
| using TMC9660::GlobalParamBankVariant = std::variant<uint8_t, tmc9660::tmcl::GlobalParamBank0, tmc9660::tmcl::GlobalParamBank2, tmc9660::tmcl::GlobalParamBank3> |
Member Enumeration Documentation
◆ BootloaderInitResult
|
strong |
Constructor & Destructor Documentation
◆ TMC9660()
|
noexcept |
◆ ~TMC9660()
|
noexcept |
Destructor for TMC9660, cleans up resources.
Member Function Documentation
◆ bootloaderInit()
|
noexcept |
Bootloader initialization.
This method initializes the bootloader mode of the TMC9660 device, allowing firmware updates or configuration changes.
- Parameters
-
cfg Optional configuration for the bootloader. If not provided, \ default settings will be used.
- Returns
- BootloaderInitResult indicating success, no config, or failure.
- Note
- This method should be called before any other operations.
◆ comm()
|
inlinenoexcept |
Get the communication interface used by this TMC9660 instance.
- Returns
- Reference to the communication interface (SPI, UART, etc).
◆ readGlobalParameter()
|
noexcept |
Read a global parameter from the TMC9660.
- Parameters
-
id Global parameter ID number. bank Bank number or index associated with the parameter (can be Bank1, Bank2, or Bank3 enum). [out] value Reference to store the read 32-bit value.
- Returns
- true if read successfully, false on error.
◆ readParameter()
|
noexcept |
Read an axis (motor-specific) parameter from the TMC9660.
- Parameters
-
id Parameter ID number to read. [out] value Reference to store the 32-bit parameter value read. motorIndex Index of the motor/axis (0 or 1).
- Returns
- true if the parameter was successfully read (device responded), false on error.
◆ sendCommand()
|
noexcept |
Send a TMCL command. Optionally return the 32-bit reply value.
◆ writeGlobalParameter()
|
noexcept |
Set (write) a global parameter on the TMC9660.
- Parameters
-
id Global parameter ID number. bank Bank number for global parameter (can be Bank1, Bank2, or Bank3 enum). value 32-bit value to write.
- Returns
- true if successfully written, false if an error occurred.
◆ writeParameter()
|
noexcept |
Set (write) an axis (motor-specific) parameter on the TMC9660.
- Parameters
-
id Parameter ID number (see TMC9660 documentation for the full list). value 32-bit value to write to the parameter. motorIndex Index of the motor/axis (0 or 1). Typically 0 unless the device controls multiple axes.
- Returns
- true if the parameter was successfully written (acknowledged by the device), false if an error occurred.
Member Data Documentation
◆ address_
|
private |
Module address (0-127). Used primarily for UART multi-drop addressing.
◆ bootCfg_
|
private |
◆ bootloader_
|
private |
Bootloader helper.
◆ comm_
|
private |
Communication interface (transport) for sending/receiving data.
◆ this [1/20]
| struct TMC9660::MotorConfig* TMC9660::this |
◆ this [2/20]
| struct TMC9660::CurrentSensing* TMC9660::this |
◆ this [3/20]
| struct TMC9660::GateDriver* TMC9660::this |
◆ this [4/20]
| struct TMC9660::FeedbackSense* TMC9660::this |
◆ this [5/20]
| struct TMC9660::FOCControl* TMC9660::this |
◆ this [6/20]
| struct TMC9660::Ramp* TMC9660::this |
◆ this [7/20]
| struct TMC9660::StepDir* TMC9660::this |
◆ this [8/20]
| struct TMC9660::ReferenceSearch* TMC9660::this |
◆ this [9/20]
| struct TMC9660::Brake* TMC9660::this |
◆ this [10/20]
| struct TMC9660::IIT* TMC9660::this |
◆ this [11/20]
| struct TMC9660::Telemetry* TMC9660::this |
◆ this [12/20]
| struct TMC9660::StopEvents* TMC9660::this |
◆ this [13/20]
| struct TMC9660::Protection* TMC9660::this |
◆ this [14/20]
| struct TMC9660::Script* TMC9660::this |
◆ this [15/20]
| struct TMC9660::RamDebug* TMC9660::this |
◆ this [16/20]
| struct TMC9660::NvmStorage* TMC9660::this |
◆ this [17/20]
| struct TMC9660::Heartbeat* TMC9660::this |
◆ this [18/20]
| struct TMC9660::Globals* TMC9660::this |
◆ this [19/20]
| struct TMC9660::GPIO* TMC9660::this |
◆ this [20/20]
| struct TMC9660::Power* TMC9660::this |
◆ tmcCRCTable_Poly7Reflected
|
private |
The documentation for this class was generated from the following files: