Loading...
Searching...
No Matches
Public Member Functions |
Private Member Functions |
Private Attributes |
Friends |
List of all members
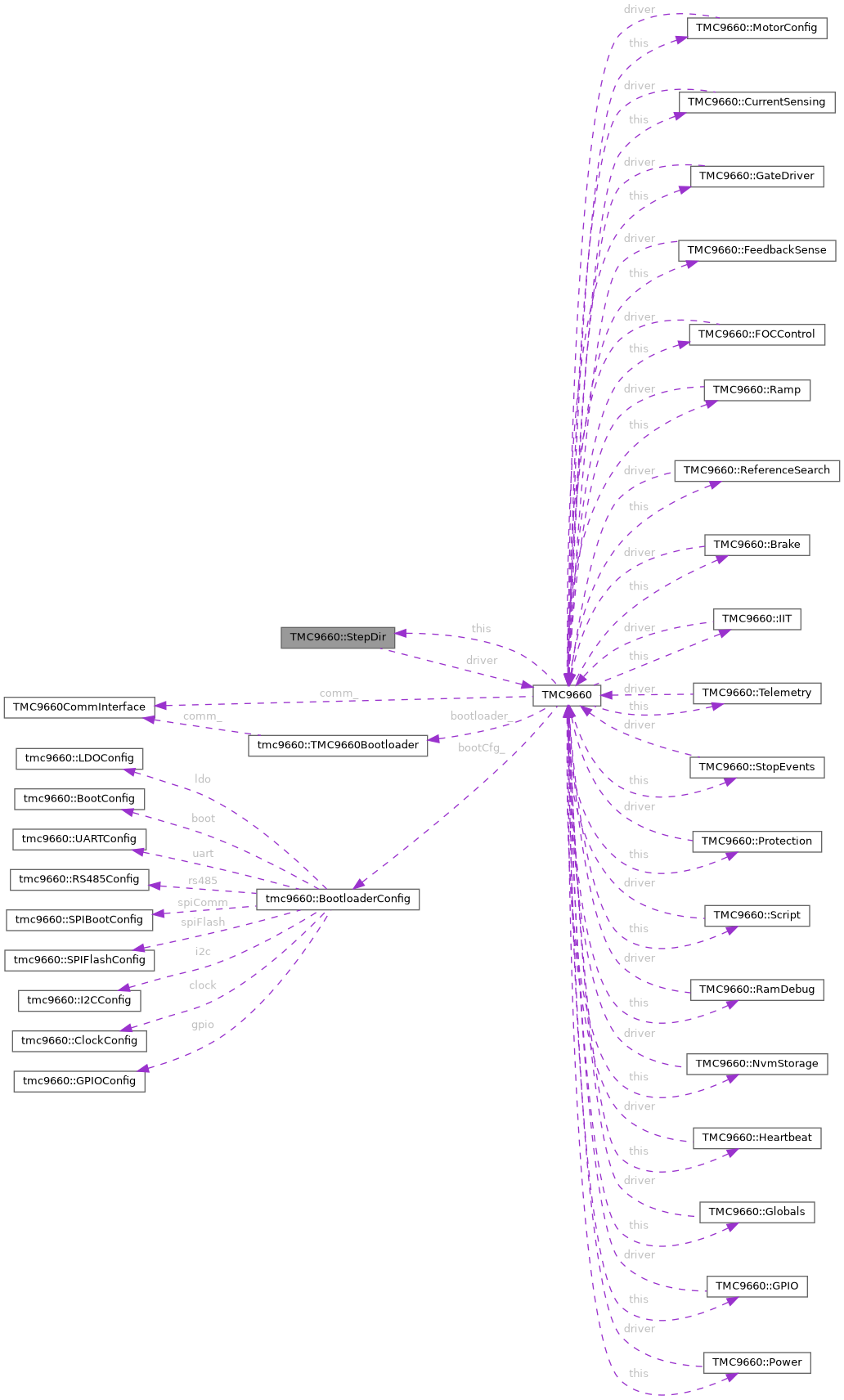
TMC9660::StepDir Struct Reference
Subsystem for controlling the STEP/DIR pulse input interface. More...
#include <TMC9660.hpp>
Collaboration diagram for TMC9660::StepDir:
Public Member Functions | |
| bool | setMicrostepResolution (tmc9660::tmcl::StepDirStepDividerShift µSteps) noexcept |
| Configure microstep resolution for each STEP pulse. | |
| bool | enableInterface (bool on) noexcept |
| Enable or disable the STEP/DIR interface. | |
| bool | enableExtrapolation (bool enable) noexcept |
| Enable signal extrapolation between STEP pulses. | |
| bool | setSignalTimeout (uint16_t timeout_ms) noexcept |
| Timeout before extrapolated motion stops after last pulse. | |
| bool | setMaxExtrapolationVelocity (uint32_t eRPM) noexcept |
| Set maximum allowed extrapolation velocity. | |
| bool | enableVelocityFeedForward (bool enableVelFF) noexcept |
| Enable hardware feed-forward terms and set gain/shift. | |
Private Member Functions | |
| StepDir (TMC9660 &parent) noexcept | |
Private Attributes | |
| TMC9660 & | driver |
Friends | |
| class | TMC9660 |
Detailed Description
Subsystem for controlling the STEP/DIR pulse input interface.
Enables stepper-style control using external STEP and DIR pulses, with support for:
- Signal extrapolation to interpolate between pulses
- Velocity feed-forward
- Microstep resolution configuration
Refer to Parameter IDs #205–#209 (Table 48). See datasheet page 95 for details on the STEP/DIR interface.
Constructor & Destructor Documentation
◆ StepDir()
|
inlineexplicitprivatenoexcept |
Member Function Documentation
◆ enableExtrapolation()
|
noexcept |
Enable signal extrapolation between STEP pulses.
- Parameters
-
enable true = enable extrapolation
- Returns
- true on success
- Parameter:
STEPDIR_EXTRAPOLATE - Behavior described on p. 96, Fig. 27
◆ enableInterface()
|
noexcept |
Enable or disable the STEP/DIR interface.
- Parameters
-
on true = enable, false = disable
- Returns
- true on success
- Parameter:
STEPDIR_ENABLE - Boot option: see datasheet Table 11
◆ enableVelocityFeedForward()
|
noexcept |
Enable hardware feed-forward terms and set gain/shift.
This allows the ramp generator to use feed-forward terms for velocity and acceleration.
- Parameters
-
enableVelFF Enable the VELOCITY_FEEDFORWARD feature (VELOCITY_FEEDFORWARD_ENABLE)
- Returns
- true on success
◆ setMaxExtrapolationVelocity()
|
noexcept |
Set maximum allowed extrapolation velocity.
- Parameters
-
eRPM Max electrical RPM before extrapolation is disabled
- Returns
- true on success
- Parameter:
STEPDIR_MAXIMUM_EXTRAPOLATION_VELOCITY
◆ setMicrostepResolution()
|
noexcept |
Configure microstep resolution for each STEP pulse.
- Parameters
-
µSteps Microsteps per full step (e.g. 256 = 1/256 resolution)
- Returns
- true on success
- Parameter:
STEPDIR_STEP_DIVIDER_SHIFT(shift of incoming step pulse count)
◆ setSignalTimeout()
|
noexcept |
Timeout before extrapolated motion stops after last pulse.
- Parameters
-
timeout_ms Timeout in milliseconds
- Returns
- true on success
- Parameter:
STEPDIR_STEP_SIGNAL_TIMEOUT_LIMIT
Friends And Related Symbol Documentation
◆ TMC9660
|
friend |
Member Data Documentation
◆ driver
|
private |
The documentation for this struct was generated from the following files: